Friction will be their greatest challenge
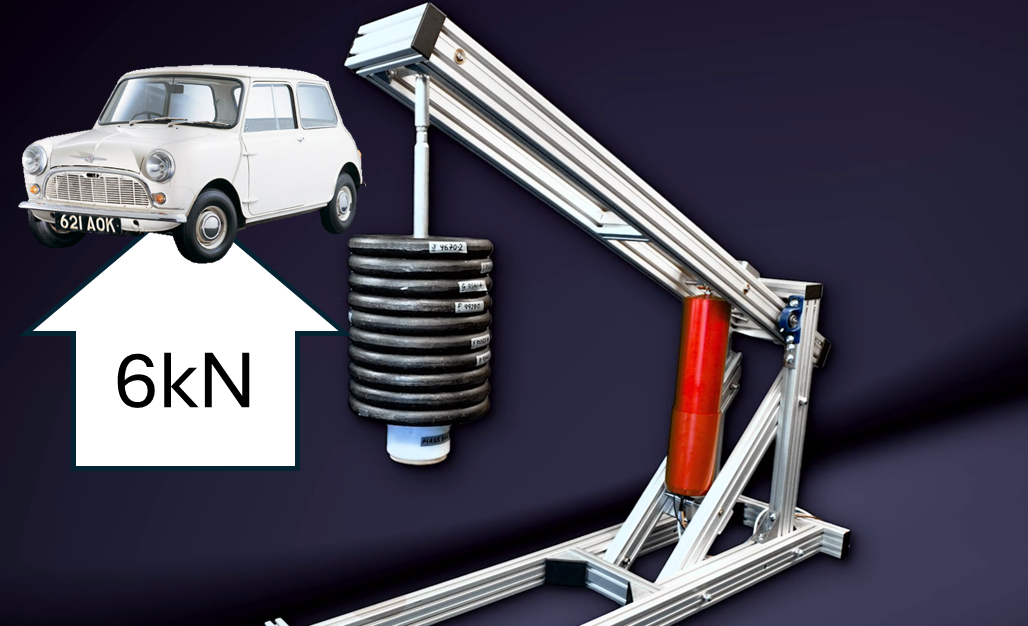
SILA P9 can do a baby grand … but its not all about force.
Comments Off on Friction will be their greatest challenge
13/07/2024
SILA P9 can do a baby grand … but its not all about force.

“There are 10’s of thousands of electric motor designs in the world … none of them were suitable for a humanoid robot… “ Musk

To get the humanoids to replace people will require mechanisms/wiring that approach these fantastic reliabilities.

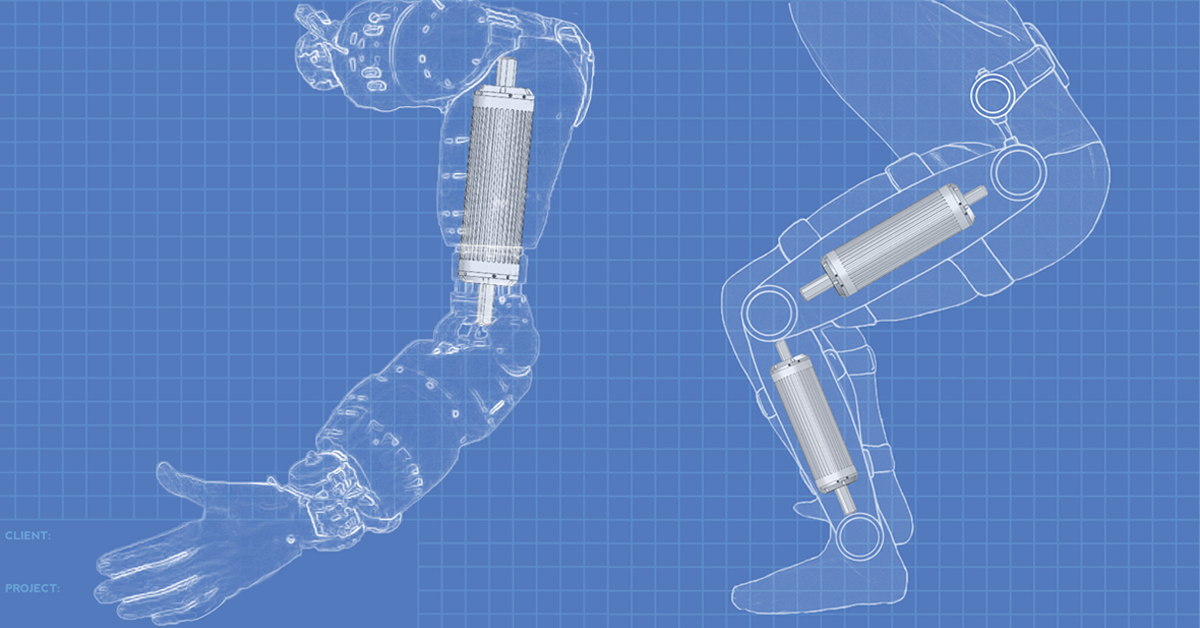
Linear actuation leaves space for wiring at the joint.

Really, it's better for the cables to be thinner if they have to be flexed.

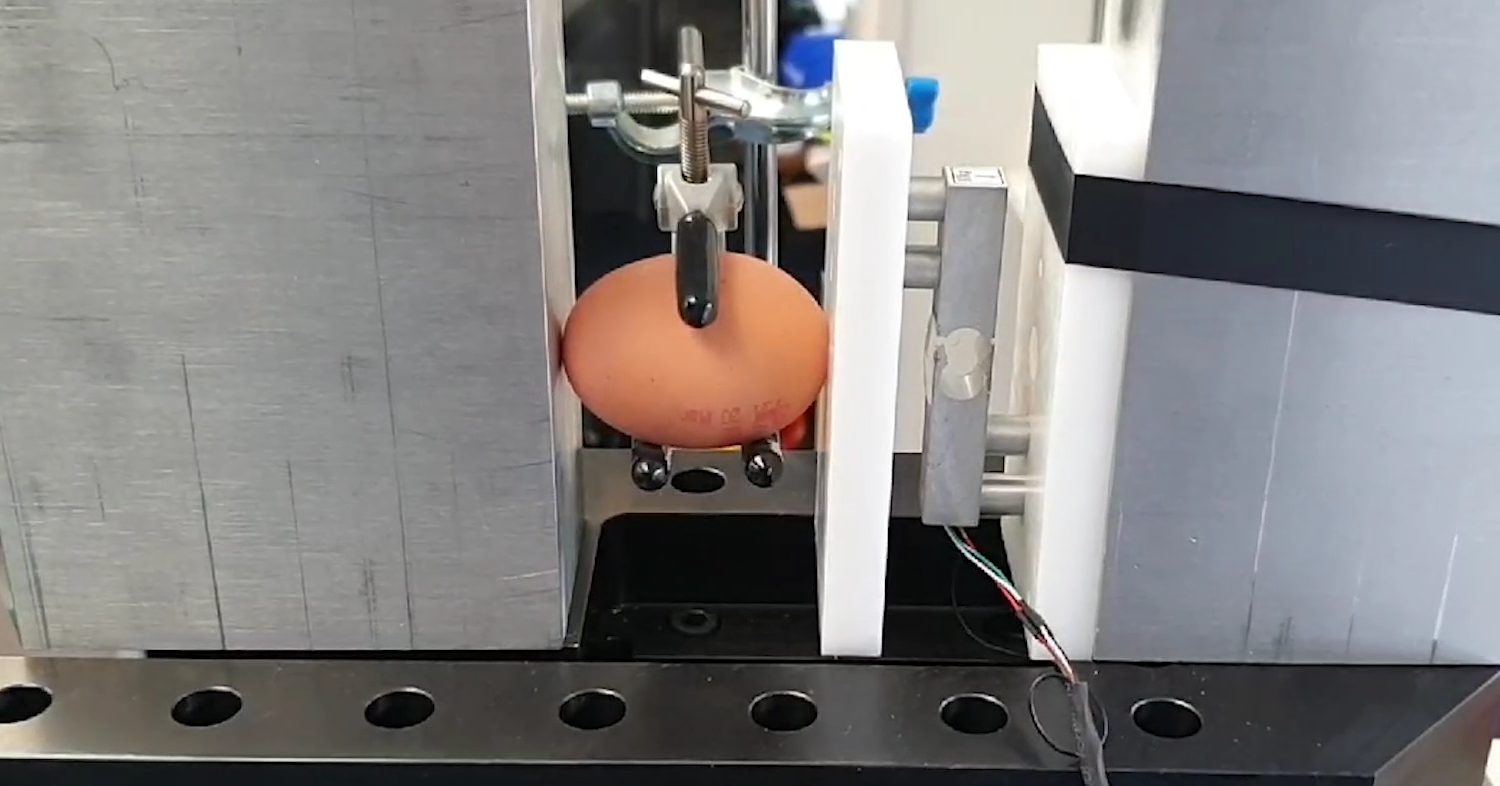
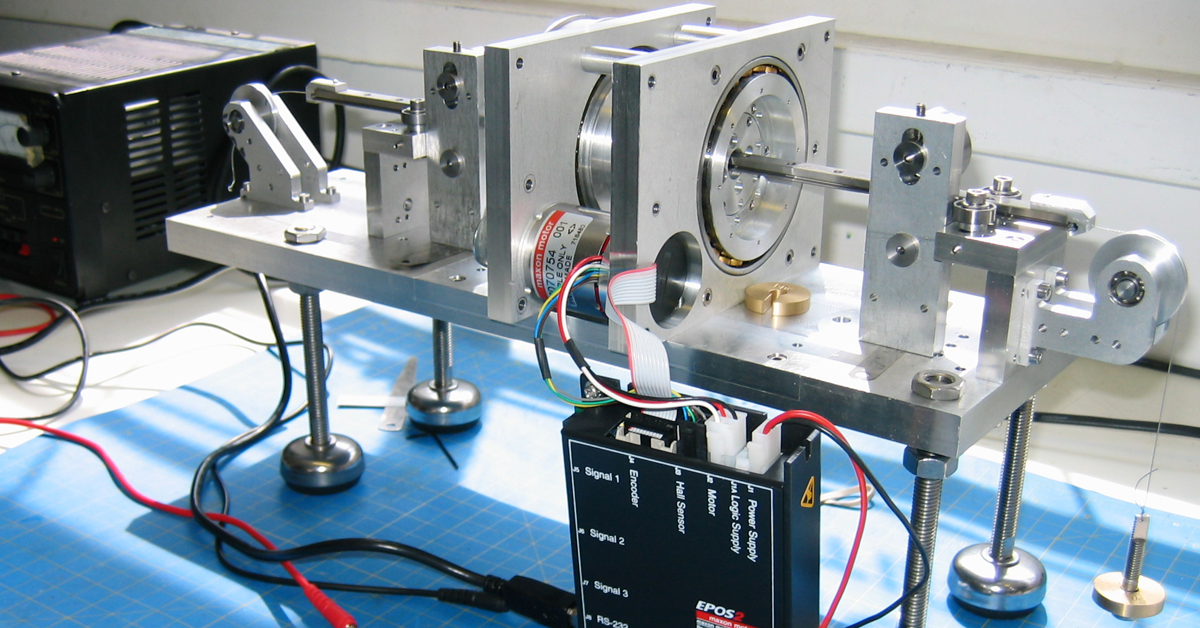
Calibrating the physical magnet properties to determine force accuracy.
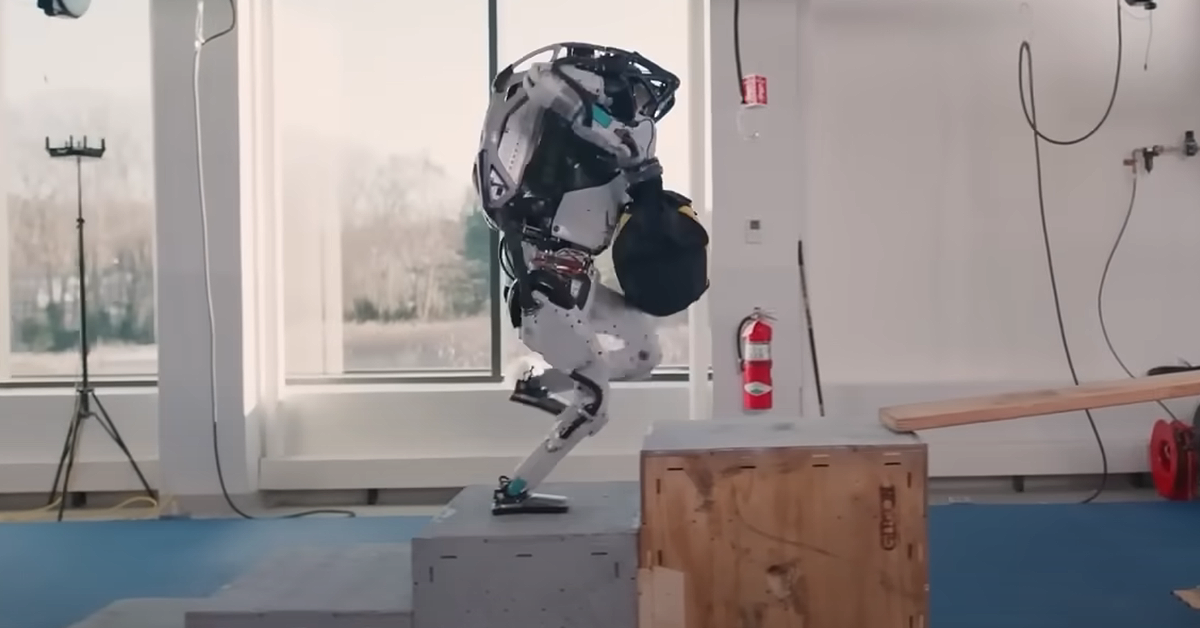
Boston Dynamics unveils fully electric humanoid robot.

Introducing SILA P8, designed and built to an Airbus cardinal point specification.

ARIA challenge - workshop on Robot dexterity

“People who think you don’t need to innovate hardware any more are wrong”
A first outing for SILA P8 at DER Live.

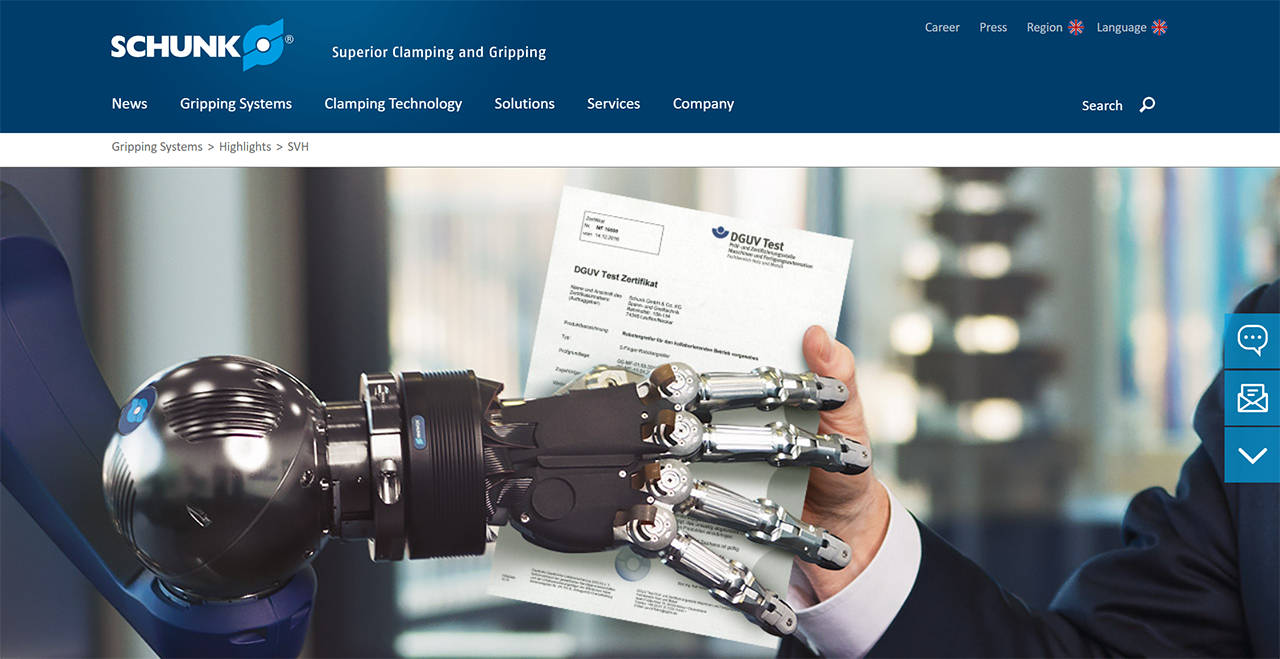
The hand that became known as Schunk SVH continues to feature in numerous projects

Making certain that the optimum output force of our actuators is achieved.
How to find the optimal magnet design.

Characteristics unique to the SILA technology allows sensing through the actuator mechanism.
The application space for high performance linear actuation is expanding rapidly
Following our trip to Iceland to demonstrate SILA P6 to Ossur, we’re working with Alastair Flew at Electro Kinetic Designs to tune SILA for Ossur evaluation.

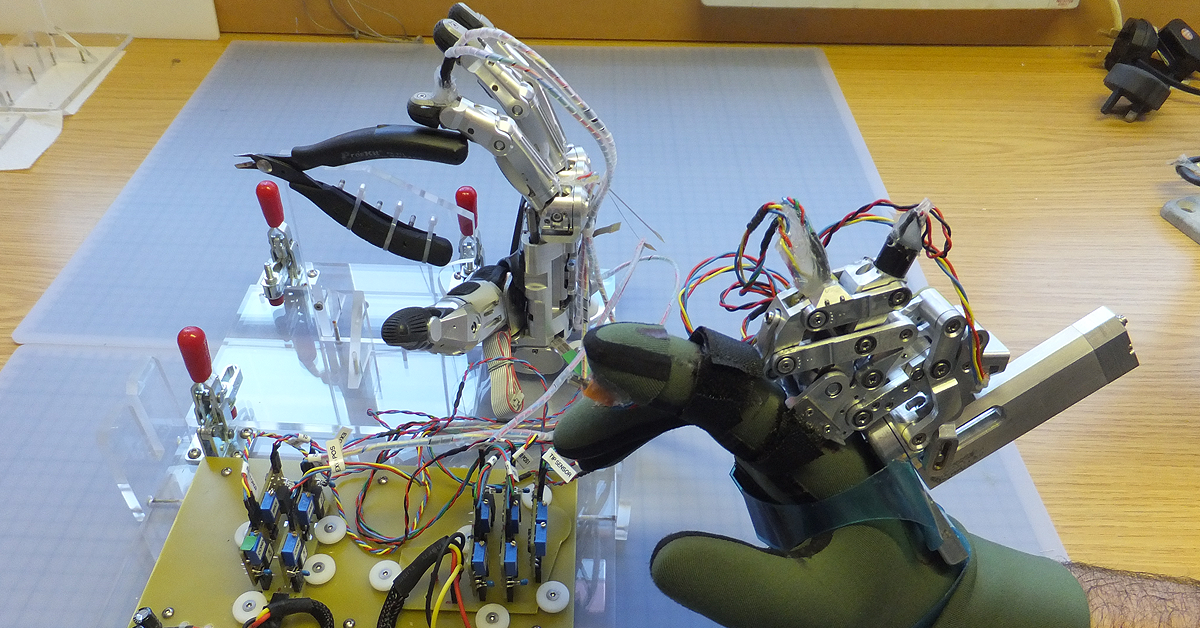
EL2 dextrous hand moves to Schunk GmbH, where it will be produced and known as the SVH.
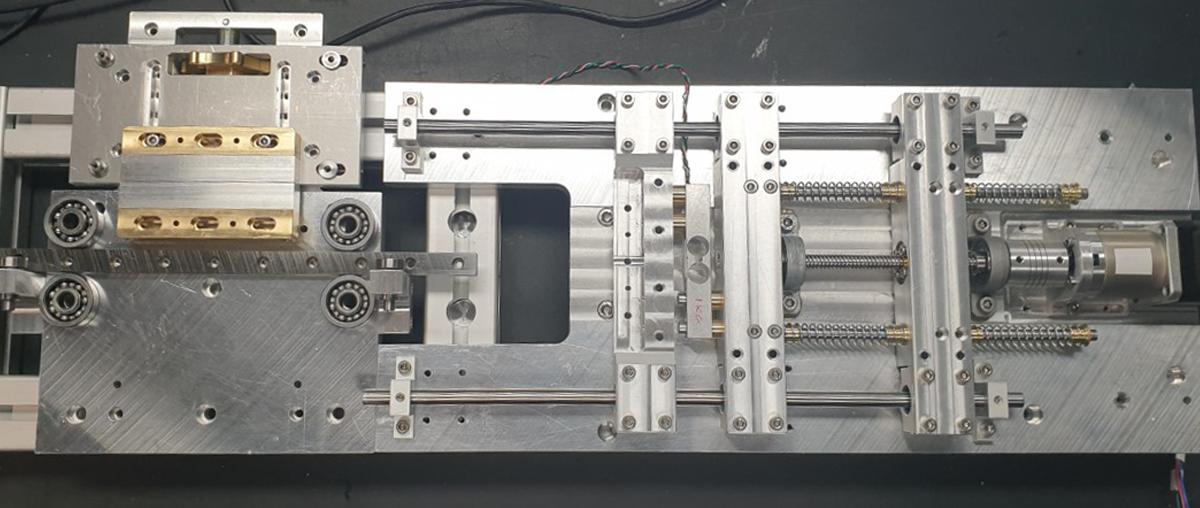
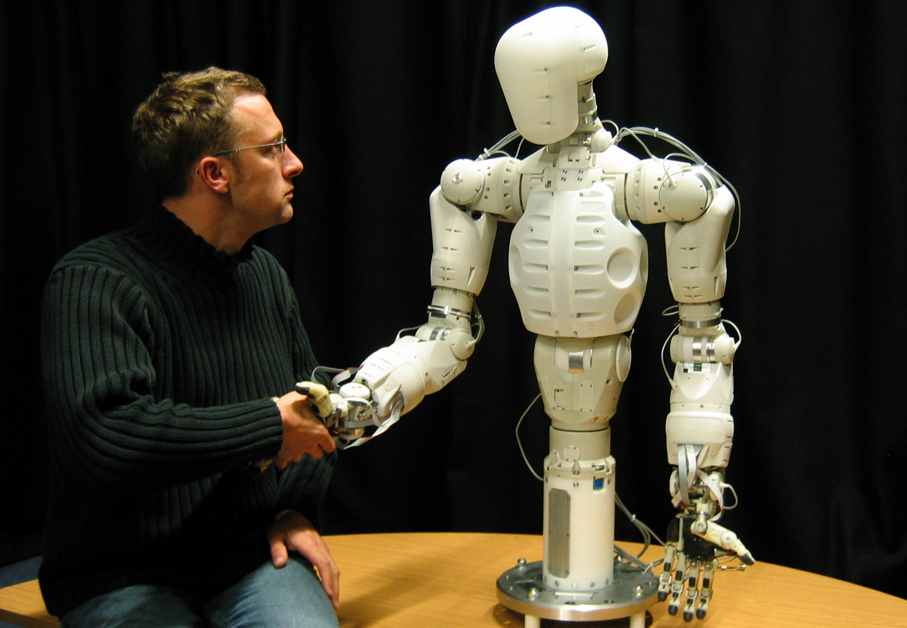
After months of design and manufacture in our workshop, RT2 finally becomes fully operational.
Our experimental rig has lifted 7g across an air gap, demonstrating SILA’s underpinning principle.
Science Museum live exhibition.

Harmonic drives combined with conventional electric motors are the go-to solution for robot joints but have limitations.

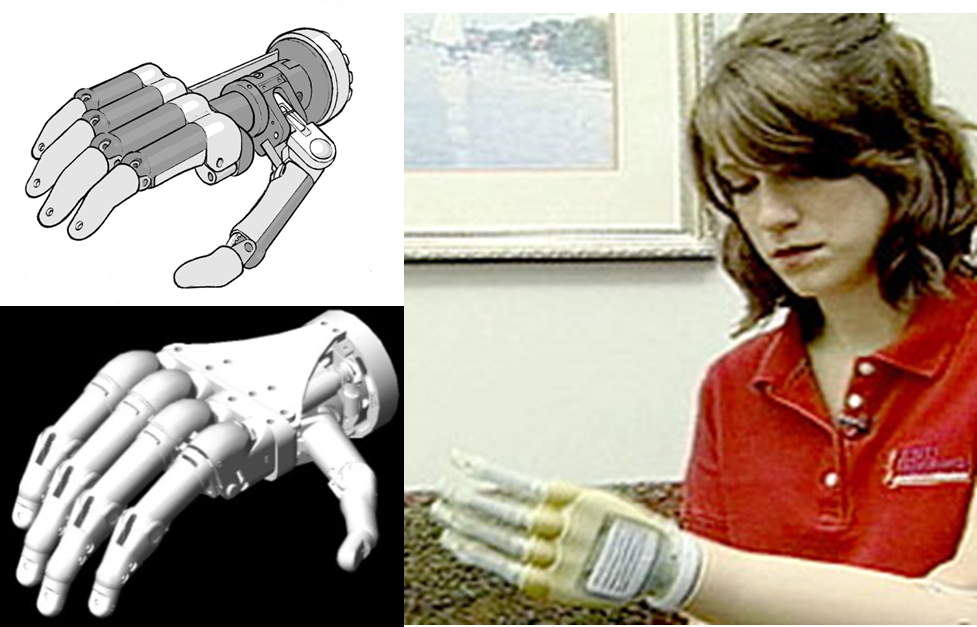
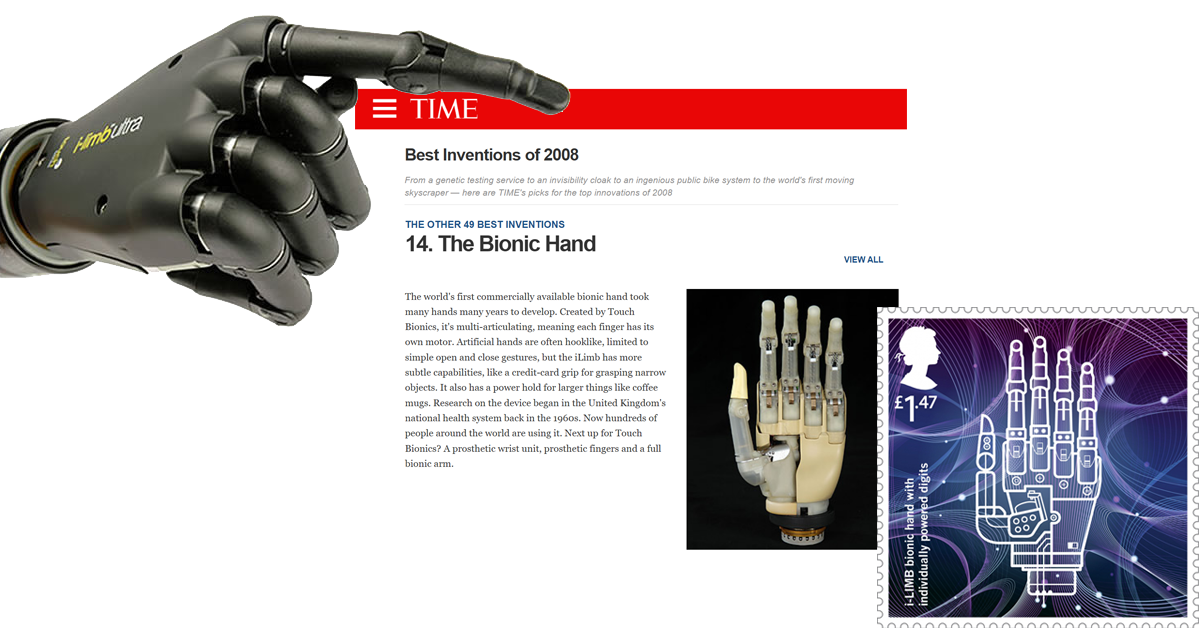
Our development of the i-Limb helps win prestigious awards and become a market leader.
Transferring the mechanical constraints of the robotic hand into a glove.
We take the i-Limb from concept sketch to fully working protype.