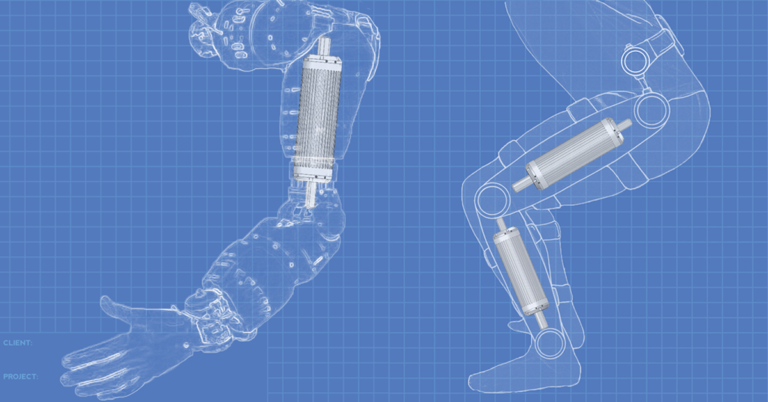
OpenAI’s Figure robot clearly shows that the amount of wiring necessary for dexterous hands cannot pass through conventional transverse mounted rotary joints.
Linear actuation leaves space for wiring at the joint.

How to find the optimal magnet design.
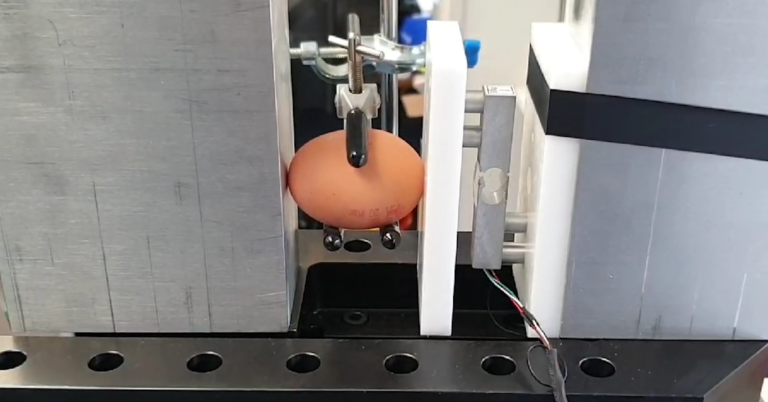
Characteristics unique to the SILA technology allows sensing through the
The application space for high performance linear actuation is expanding